主要特征
Crazepony四轴飞行器采用32位ARM处理器STM32,在传统2.4G遥控器控制基础上,实现智能手机蓝牙2.1/4.0 BLE遥控功能。在结构/软硬件上为DIY提供可扩展接口,基于CrazePony可以制作航拍四轴和自平衡小车。
72MHz的32位Cortex-M3架构处理器STM32
传统蓝牙/蓝牙4.0 BLE无线控制
2.4G无线射频收发芯片nRF24L01+无线控制
650mAh航模电池,6分钟续航能力

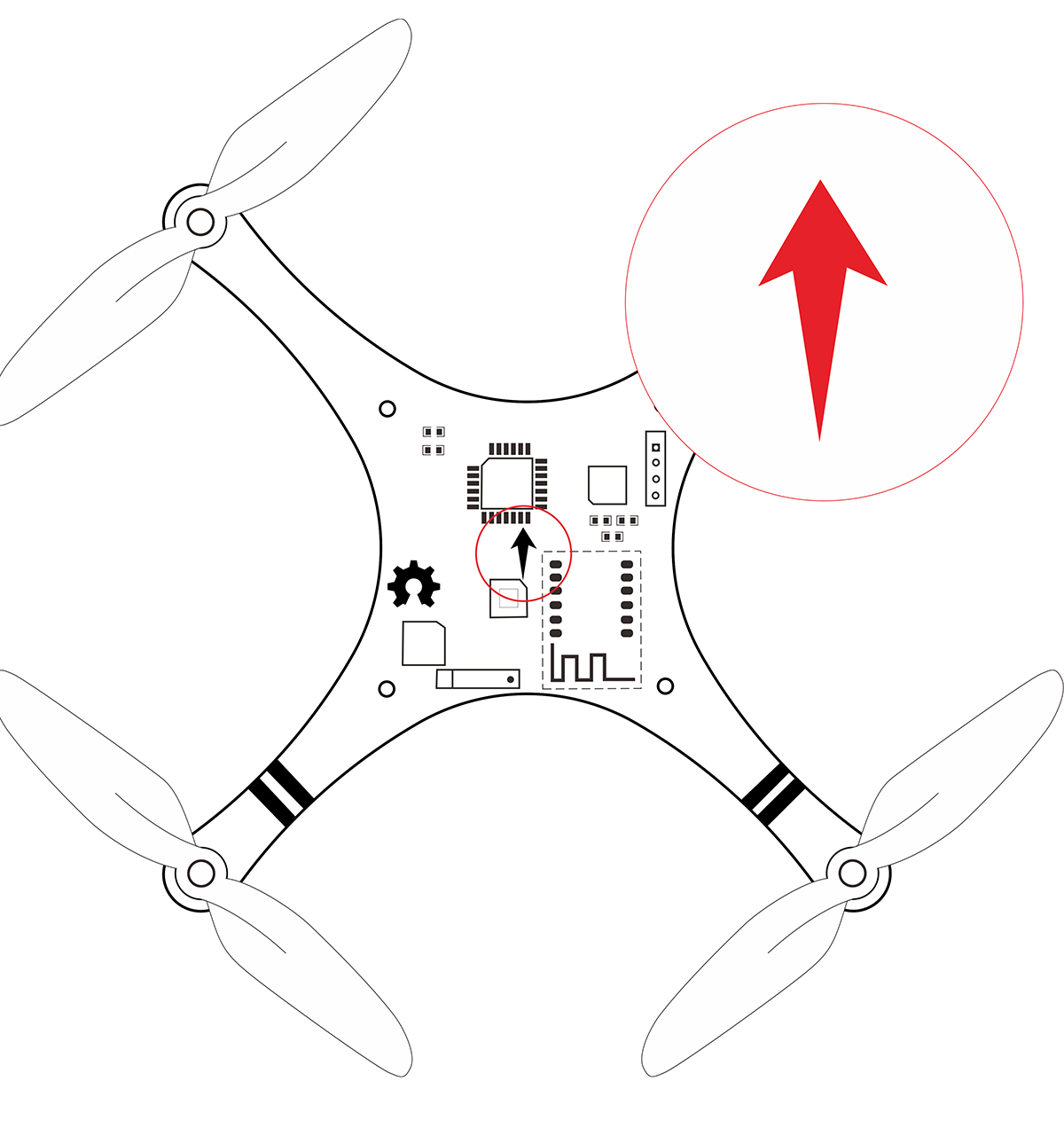
对角距离14厘米,真正的掌上四轴
6维度传感器MPU6050
高精度气压计MS5611,实现Z轴方向室内自主悬停
Cleanflight飞控系统支持(计划)
Crazepony是完全开源的,我们的项目托管在github上。
github上查看该项目