CrazePony与计算机视觉
作者: Ziv.Lin
大家好,我是CrazePony的视觉攻城狮,Ziv.Lin,我擅长的部分是计算机视觉和嵌入式编程,非常荣幸地能够加入CrazePony团队~
众所周知,一个飞行器想要做到悬停的话,必须引入一个位置环进行反馈,也就是说需要获知无人机的空间绝对坐标,目前的无人机普遍采用GPS(Global Position System)以获得其位置,但是GPS信号存在容易受干扰(甚至是欺骗,伊朗截获美国的RQ170就是采用GPS欺骗的方法)、在室内没有信号等无法克服的弊端,如今,业界正在寻求一种解决方案,以克服GPS的这些先天性的缺点,也就是我今天想要说的计算机视觉( ^_^ )
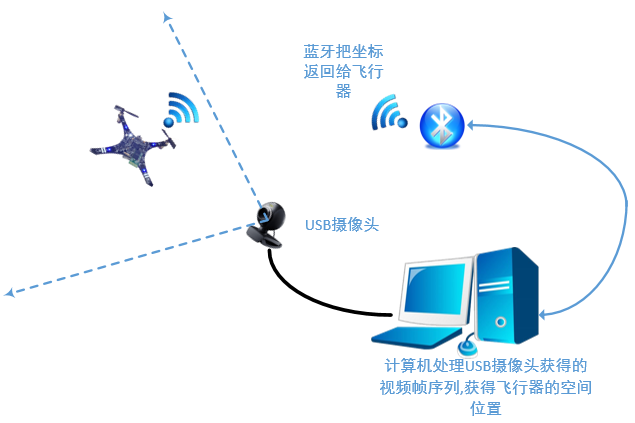
对于类似CrazePony这些微型飞行器来说,载重相当有限,不大可能机载GPS系统(因为如果想要获得较低的定位误差,必须使用介电陶瓷的天线,其重量较重),想要实现悬停等动作,比较可行的方法就是引入视觉定位系统,如下图所示.
CrazePonzy的计算机视觉定位我打算分为三步走:
第一步:就是实现四轴飞行器的视觉跟踪,现在已经初步完成~
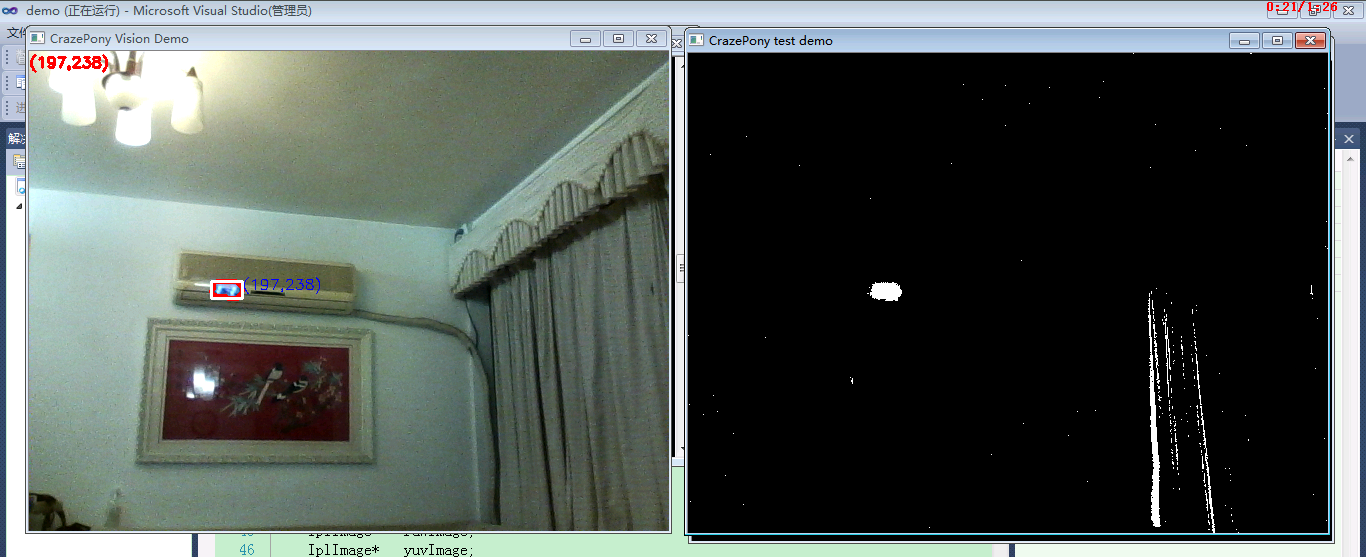
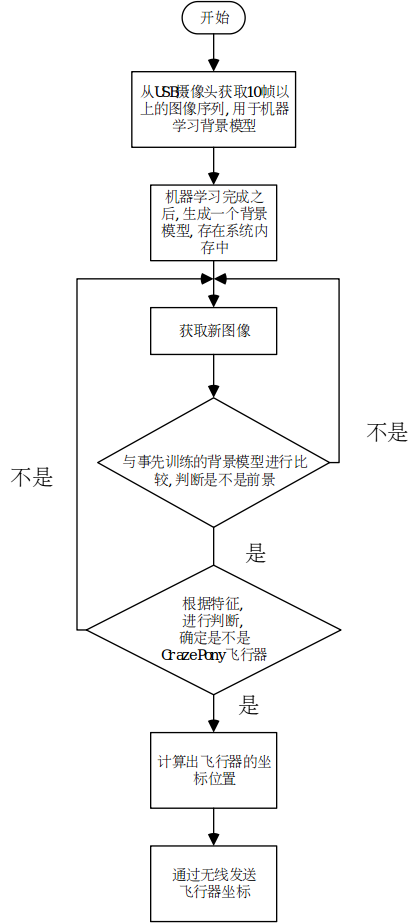
这个视觉定位系统视频已经上传至CrazePony的首页(也附加在本文最后),这个是基于OpenCV库开发的一个定位系统,其算法流程图如下所示:
第二步:就是实现飞行器的航线飞行,现在,我们团队正在努力实现中
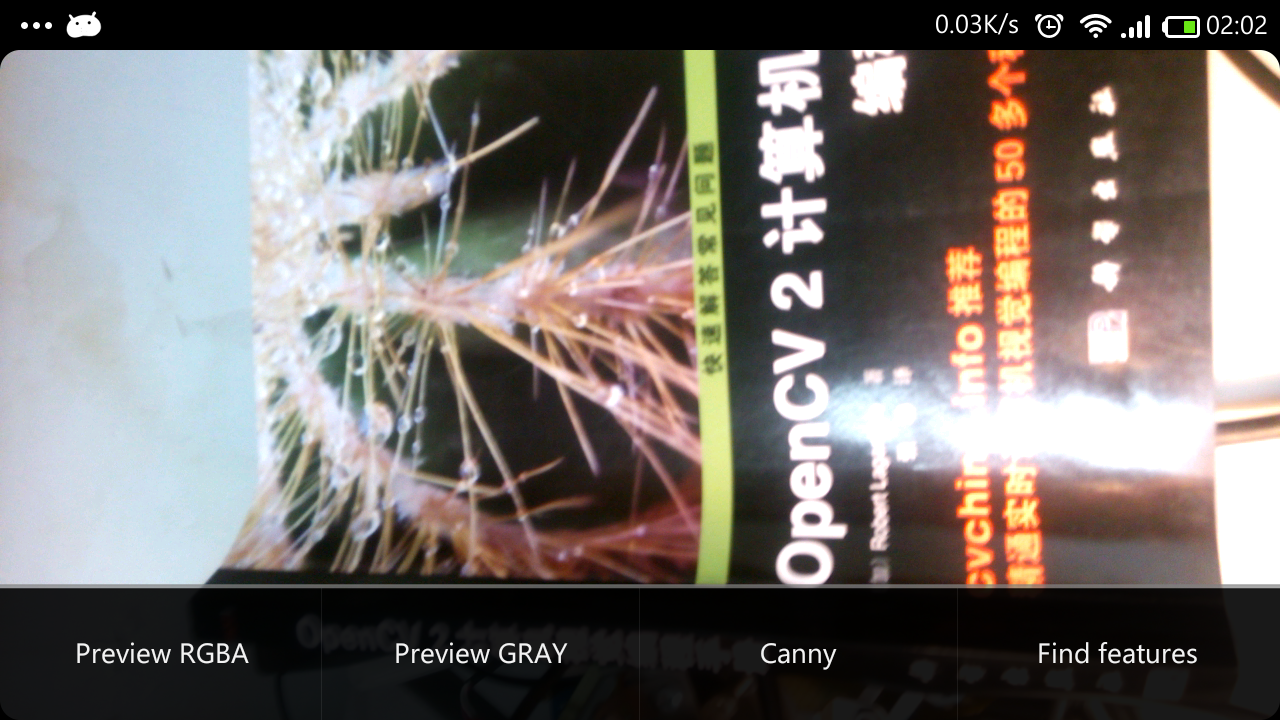
第三部:把所有的计算机视觉移植到手机平台去,现在我们已经实现OpenCV库在Android上面的移植了,相信总有一天,你可以使用你的手机飞CrazePony了

最后附上Crazepony视觉定位系统的优酷视频。